
Как создаются промышленные роботы? Один из крупнейших в мире производителей робототехники Kawasaki представил краткое описание. Изучите его и вы узнаете, из каких частей состоит робот и за счет чего происходит движение его манипулятора.
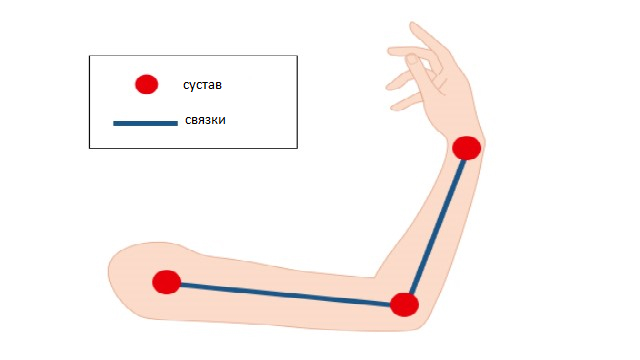
Многие зачастую задаются вопросом: «Роботы и люди устроены одинаково?» Да, у нас есть одна общая характерная особенность. Это одинаковая базовая структура связок и суставов.
Роботизированные руки по своему строению напоминают руку человека. У людей есть локоть и плечо, суставы, позволяющие рукам свободно изгибаться, а также кости соединяющие суставы. Такой принцип движения суставов и передачи мощности через связки типичен как для людей так и для роботов.
Различают два типа соединения связок: последовательное и параллельное.
Плечо, рука и запястье человека соединены последовательно. А что же в отношении роботов?
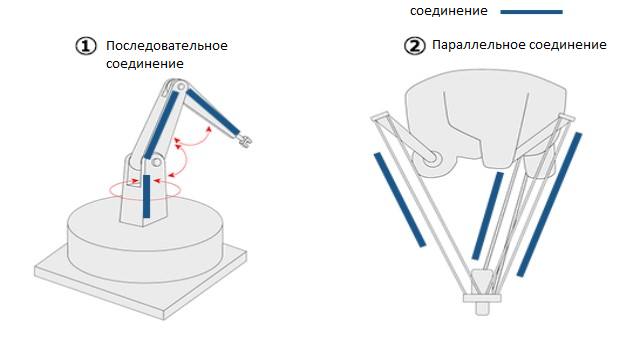
Для большинства стандартных манипуляторов характерно последовательное соединение. Однако возможно еще и параллельное соединение. Этим отличаются например роботы SCARA.
Стандартный манипулятор с последовательным сочленением как уже было упомянуто напоминает человеческую руку. Он имеет 6 суставов, которые называются оси.
На следующем рисунке показано сравнение движений робота и человека.
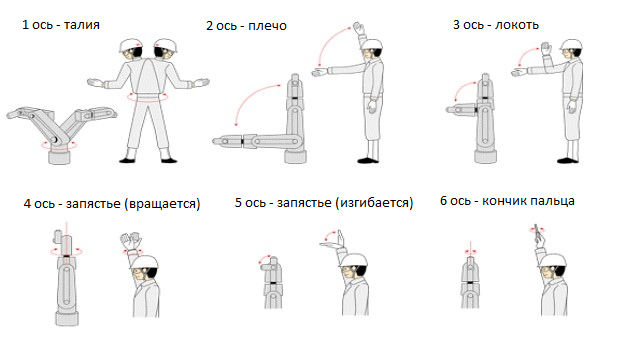
На первых трех осях запястье находится в фиксированном положении, а на следующих трех может свободно перемещаться. Таким образом роботы могут двигаться совсем как люди.
Движение суставов – достаточно тонкий процесс. Кабели и жгуты встраиваются в руку и это позволяет избежать создания помех периферийному оборудованию. В результате технологическое решение может успешно работать в ограниченном пространстве.
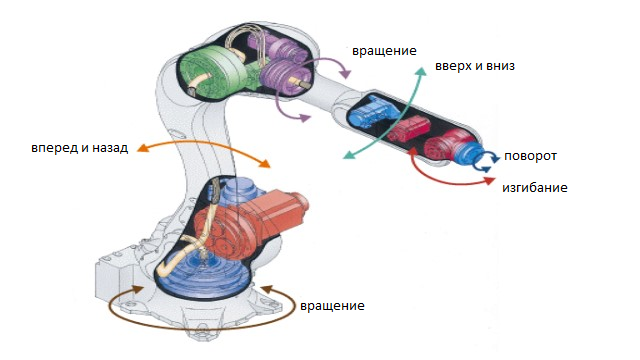
Как видим робот состоит из множества разных частей. Среди них четыре наиболее важные детали: сервопривод, редуктор, энкодер и трансмиссия.
Сервопривод (обозначен на рисунке красным цветом) преобразует энергию (электрическую, пневматическую, гидравлическую) в механические движения и позволяет роботу перемещать руку вверх и вниз или вращаться. Сравнить его принцип действия можно с двигателем. Он позволяет управлять положением устройства и его скоростью.
Редуктор (обозначен на рисунке синим цветом) — это устройство для увеличения мощности сервопривода. Он необходим поскольку сервопривод ограничен в мощности, которую может вырабатывать.
Энкодер — это устройство, указывающее положение вращательного вала сервопривода. С помощью него можно получить данные о том, в каком направлении и насколько быстро движется робот.
Трансмиссия представляет собой компонент, передающий мощность, генерируемую сервоприводами и редукторами. Трансмиссия также способна изменять направление и величину мощности.
Например велосипеды приводятся в движение, принимая вращательное движение от педалей и передавая его на колесо. Эта идея также применяется к структуре робототехнических решений.
Используемый в роботах сервопривод обычно размещается рядом с суставами, но его также можно установить в стороне от суставов с помощью механизмов передачи, таких как ремни и шестерни. Например в запястье робота.
Люди могут выполнять различные операции с помощью инструментов. Робототехнические решения справляются с этой задачей с помощью захватов. Захваты бывают различных типов: для непосредственного захвата предметов, сварки и покраски, вакуумные (присоски) и т.д. Благодаря этому манипуляторы могут выполнять как стандартные операции по поднятию предметов, так и более специфические для них задачи такие как сортировка хрупкой продукции, покраска автомобилей и т.д.
Итак мы рассмотрели строение роботов до «кончиков пальцев». Осталось только подобрать необходимый вам робот в зависимости от ожидаемой функциональности.
— Промышленные роботы Kawasaki в каталоге robotforum.ru
Автор: Елизавета Эрмант: 22.07.2018
Источник: Roboticsandautomationnews
Источник: